當你想用單晶片控制馬達時,最大的麻煩一定是轉速的控制。一般來說,數位電路只能會送出高態與低態兩種電壓,也就是 Arduino 的正 5V 以及 0V。而這種電壓只能控制馬達轉或不轉,並無法控制轉速。因此我們需要倚靠 PWM 來做控制。
幸運的是,Arduino 的晶片也有提供這個功能。
基本語法
Arduino 的 PWM 控制的語法也很簡單,首先要先定義腳位為輸出
|
1 2 |
pinMode(腳位, OUTPUT); // UNO: 3, 5, 6, 9, 10, 11 |
然後使用這個語法來控制
|
1 2 3 |
// 數值:0 ~ 255 analogWrite(腳位, 數值); |
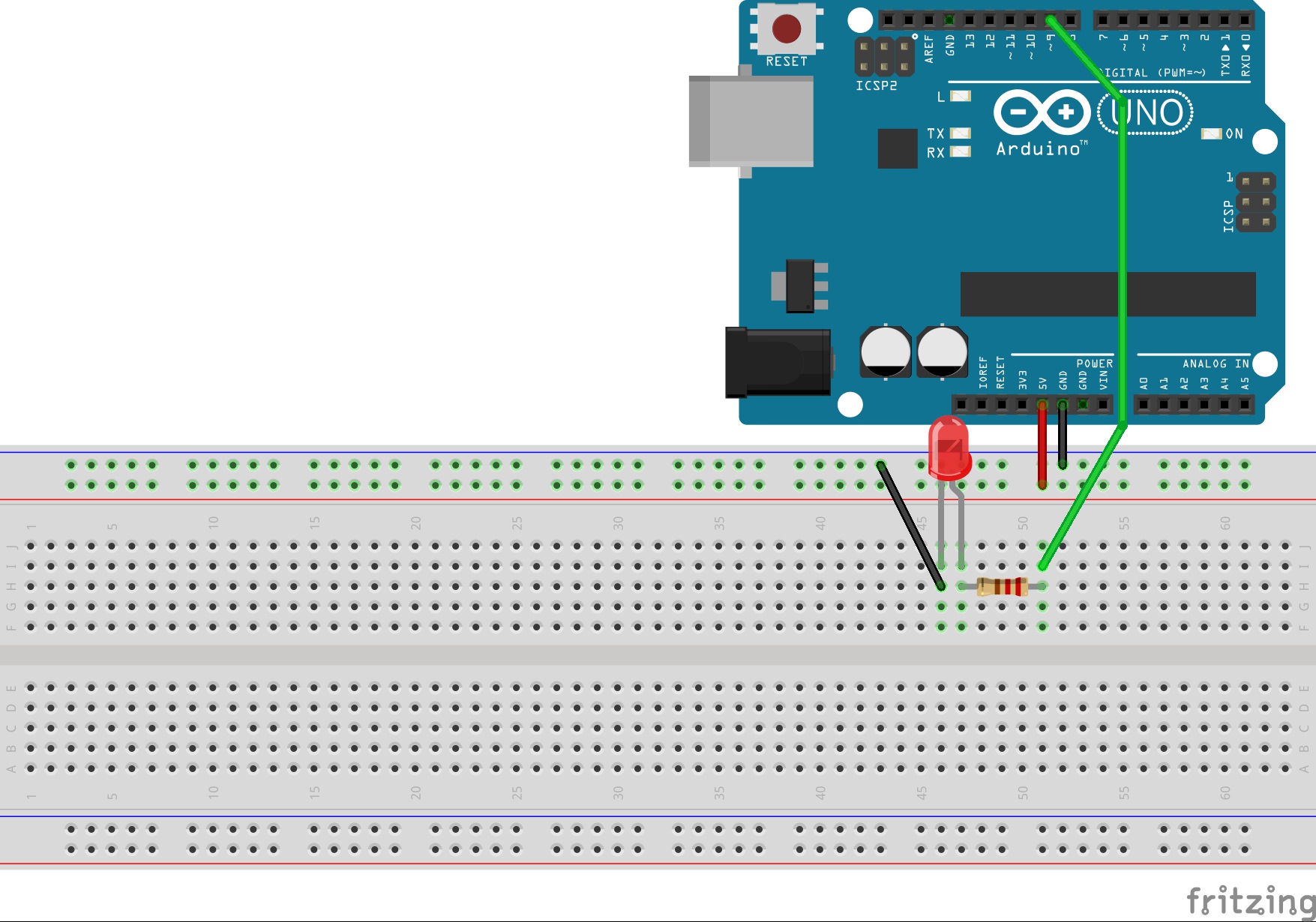
呼吸燈
緩緩亮起又緩緩暗淡的 LED 燈。
硬體接線
程式碼
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
int led = 9; // LED 腳位 int val = 0; // 亮度值 int isMax = 0; // 紀錄亮度是否為最亮 void setup() { pinMode(led, OUTPUT); } void loop() { analogWrite(led, val); // 如果亮度小於 254 且不是最亮 if( val < 254 && !isMax ) i++; else isMax = 1; // 如果亮度大於等於 0 且曾經為最亮 if( val >= 0 && isMax ) i--; else isMax = 0; } |
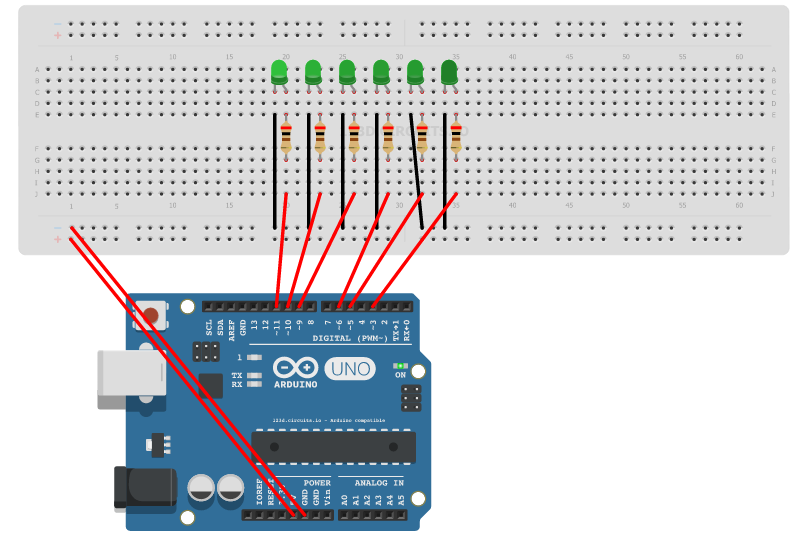
流水呼吸燈
跑馬燈不夠炫,來個更酷炫的拖曳燈吧!
接線與模擬
程式碼
雖然上面的模擬器已經有了,不過我還是貼上來比較好看些。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
// 設定 LED PWM 腳位 int led[6] = {3, 5, 6, 9, 10, 11}; // 計算 LED 陣列長度 int led_length = sizeof(led) / sizeof(int); // 4個依序遞減的亮度 int bright[4] = {128, 32, 8, 0}; // 延遲 int d = 80; // 廣域變數 int i, j; void setup() { // 設定為輸出 for(int i=0;i<led_length;i++) { pinMode(led[i], OUTPUT); } } void loop() { // 從第一個燈開始 for (i=0;i<led_length;i++) { analogWrite(led[i], 255); // 後面的燈逐個給予不同亮度的值 for(j=0; ((j<4) && (i-j>0)); j++) { analogWrite(led[i-j-1], bright[j]); } delay(d); } // 把後續的燈慢慢滅掉 for (j=i-4; i-j > 0; j++) { for (int k=0; k<i-j; k++) { analogWrite(led[j+k], bright[3-k]); } delay(d); } } |
到這邊,我們就把基本的 PWM 輸出的部份講完了,然後最後這個範例不錯對吧? 可惜 UNO 上只有 6 個 PWM,不然會更好看。
題外話,關於模擬器的部份是意外找到的,它是一個有相當多功能的線上電路模擬器,而且介面操作十分簡單,相當適合當手邊沒有足夠材料但又手癢想要測試一些想法的時候用。
- 123D CIRCUITCS : https://123d.circuits.io/